
3D baskılı AZ-EL rotator Bu proje fikri pa3axa tarafından 24GHz’de kısa menzilli düzlem dağılımlı qso’lar yapmak için başlatıldı. Hafif bir baskılı çanakla birlikte wavelab 24GHz modüllerinin kullanılabilirliği, uçakları izlemek için hafif bir AZ-EL rotatoruna izin verir. Uçak konumu, çevredeki alandaki uçaklardan adsb verileri alınarak sağlanır. Rotator bir tripoda monte edilecek ve ayrıca uydu takibi için küçük bir combi yagi’yi tutacak kadar güçlüdür. İlk adım, adsb alıcısına veya diğer bilgisayar yazılımlarına arayüz oluşturma olanağı olan bir kontrol panosu ile birlikte düşük maliyetlerle tamamen 3D baskılı küçük bir AZ-EL sistemi tasarlamaktır.
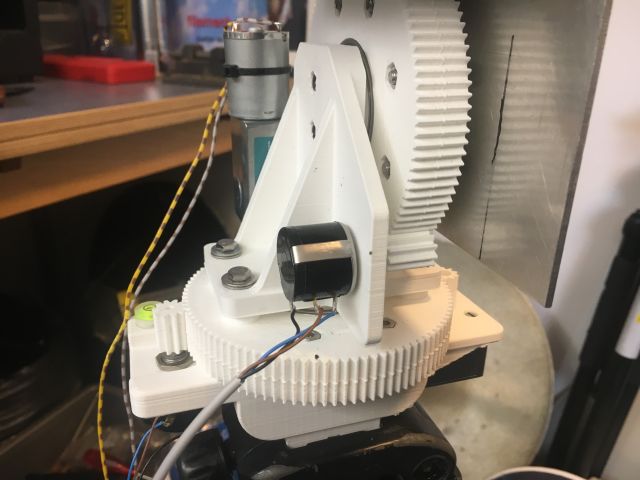
Aşağıdaki basılı parçalar PLA’dan yapılmalı, duvar kalınlığı 1 mm ve dolgu oranı %10 olmalıdır
Alt taban plakası (1 adet) taban plakası_2.STL
Dikey taban (1 adet) dikey taban.STL
Büyük dişli yarısı (4 adet) tandwiel_groot.STL
Motor dişlisi (2 adet) tandwiel_motor.STL tandwiel_motor.STL
Direnç dişlisi (2 adet) tandwiel_potmeter.STL
Dişli kelepçesi (2 adet) lagerklem.STL
Ayırıcı halka (8 adet) bus.STL
Diğer parçalar:
Bilyalı rulman (4 adet) : 35x44x5mm 6707-2R Aliexpress
Motor (2 adet) : Bringsmart (2 adet) JGY-370 12V 10rpm Aliexpress
10 tur değişken direnç Junkbox
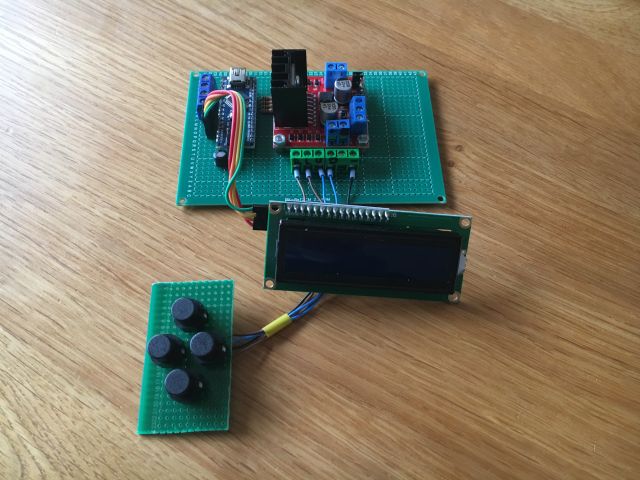
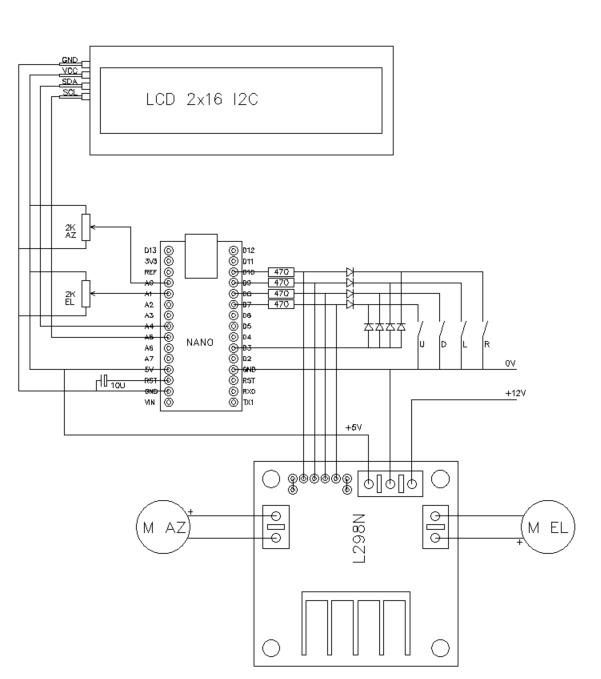
Kontrol panosu
Rotor kontrolü, çekirdeğinde bir Arduino nano, bir L298N köprü motor kontrolörü ve I2C 16×2 lcd ekran bulunur. Yazılım Simplesat yayınına dayanmaktadır. Rotor kontrolörü, birçok farklı izleme yazılımı tarafından oluşturulan Yeasu GS-232 komutlarını dinler.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 |
#if defined(ARDUINO) && ARDUINO >= 100 #include "Arduino.h" #else #include "WProgram.h" #endif #include <Wire.h> #include <LCD.h> #include <LiquidCrystal_I2C.h> #include <SoftwareSerial.h> // use software uart library LiquidCrystal_I2C lcd(0x27,2,1,0,4,5,6,7); const long _azAdZeroOffset = 0; // adjust to zero out lcd az reading when control box az = 0 const long _elAdZeroOffset = 0; // adjust to zero out lcd el reading when control box el = 0 /* 10 bit A/D converters in the Arduino have a max value of 1023 for the azimuth the A/D value of 1023 should correspond to 360 degrees for the elevation the A/D value of 1023 should correspond to 360 degrees integer math is used so the scale value is multiplied by 100 to maintain accuracy the scale factor should be 100 * (1023 / 360) for the azimuth the scale factor should be 100 * (1023 / 360) for the elevation */ const long _azScaleFactor = 284; // adjust as needed const long _elScaleFactor = 284; // adjust as needed // lcd display control const byte _backLightOn = 0x11; // lcd back light on const byte _cursorOff = 0x16; // lcd cursor off const byte _clearScreen = 0x0C; // lcd clear screen const byte _line0 = 0x80; // lcd line 0 - top line const byte _line1 = 0x94; // lcd line 1 - bottom line // pins const byte _azimuthInputPin = A0; // azimuth analog signal from potmeter const byte _elevationInputPin = A1; // elevation analog signal from potmeter const byte _G5500UpPin = 7; // elevation rotor up control line const byte _G5500DownPin = 8; // elevation rotor down control line const byte _G5500LeftPin = 9; // azimuth rotor left control line const byte _G5500RightPin = 10; // azimuth rotor right control line int _ResetPin = 3; int val=0; // take care if you lower this value - wear or dirt on the pots in your rotors // or A/D converter jitter may cause hunting if the value is too low. long _closeEnough = 100; // tolerance for az-el match in rotor move in degrees * 100 // ------------------------------------------------------------ // ------ values from here down should not need adjusting ----- // ------------------------------------------------------------ // rotor const long _maxRotorAzimuth = 45000L; // maximum rotor azimuth in degrees * 100 const long _maxRotorElevation = 18000L; // maximum rotor elevation in degrees * 100 long _rotorAzimuth = 0L; // current rotor azimuth in degrees * 100 long _rotorElevation = 0L; // current rotor azimuth in degrees * 100 long _azimuthTemp = 0L; // used for gs232 azimuth decoding long _elevationTemp = 0L; // used for gs232 elevation decoding long _newAzimuth = 0L; // new azimuth for rotor move long _newElevation = 0L; // new elevation for rotor move long _previousRotorAzimuth = 0L; // previous rotor azimuth in degrees * 100 long _previousRotorElevation = 0L; // previous rotor azimuth in degrees * 100 unsigned long _rtcLastDisplayUpdate = 0UL; // rtc at start of last loop unsigned long _rtcLastRotorUpdate = 0UL; // rtc at start of last loop unsigned long _displayUpdateInterval = 500UL; // display update interval in mS unsigned long _rotorMoveUpdateInterval = 100UL; // rotor move check interval in mS boolean _gs232WActice = false; // gs232 W command in process int _gs232AzElIndex = 0; // position in gs232 Az El sequence long _gs232Azimuth = 0; // gs232 Azimuth value long _gs232Elevation = 0; // gs232 Elevation value boolean _azimuthMove = false; // azimuth move needed boolean _elevationMove = false; // elevation move needed String azRotorMovement; // string for az rotor move display String elRotorMovement; // string for el rotor move display // // run once at reset // void setup() { // initialize serial ports: Serial.begin(9600); // control lcd.begin(16, 2); // Inizializzo LCD 16 caratteri per 2 linee delay (200); lcd.setBacklightPin(3,POSITIVE); lcd.setBacklight(HIGH); // initialize rotor control pins as outputs pinMode(_G5500UpPin, OUTPUT); pinMode(_G5500DownPin, OUTPUT); pinMode(_G5500LeftPin, OUTPUT); pinMode(_G5500RightPin, OUTPUT); pinMode(_ResetPin, INPUT_PULLUP); // set all the rotor control outputs High digitalWrite(_G5500UpPin, HIGH); digitalWrite(_G5500DownPin, HIGH); digitalWrite(_G5500LeftPin, HIGH); digitalWrite(_G5500RightPin, HIGH); lcd.clear(); // clear screen delay(100); // wait for clear screen lcd.println(" PE1CKK V1.8 "); delay(2000); lcd.clear(); // clear screen } // // main program loop // void loop() { // check for serial data if (Serial.available() > 0) { decodeGS232(Serial.read()); } unsigned long rtcCurrent = millis(); // get current rtc value // check for rtc overflow - skip this cycle if overflow if (rtcCurrent > _rtcLastDisplayUpdate) // overflow if not true _rotorMoveUpdateInterval { // update rotor movement if necessary if (rtcCurrent - _rtcLastRotorUpdate > _rotorMoveUpdateInterval) { _rtcLastRotorUpdate = rtcCurrent; // reset rotor move timer base // AZIMUTH readAzimuth(); // get current azimuth from G-5500 // see if azimuth move is required if ( (abs(_rotorAzimuth - _newAzimuth) > _closeEnough) && _azimuthMove ) { updateAzimuthMove(); } else // no move required - turn off azimuth rotor { digitalWrite(_G5500LeftPin, HIGH); digitalWrite(_G5500RightPin, HIGH); _azimuthMove = false; azRotorMovement = " "; } // ELEVATION readElevation(); // get current elevation from G-5500 // see if aelevation move is required if ( abs(_rotorElevation - _newElevation) > _closeEnough && _elevationMove ) // move required { updateElevationMove(); } else // no move required - turn off elevation rotor { digitalWrite(_G5500UpPin, HIGH); digitalWrite(_G5500DownPin, HIGH); _elevationMove = false; elRotorMovement = " "; } } // end of update rotor move // update display if necessary if (rtcCurrent - _rtcLastDisplayUpdate > _displayUpdateInterval) { // update rtcLast _rtcLastDisplayUpdate = rtcCurrent; // reset display update counter base displayAzEl(_rotorAzimuth, _rotorElevation); } } else // rtc overflow - just in case { // update rtcLast _rtcLastDisplayUpdate = rtcCurrent; } // uitzetten bij bedienen knop val = digitalRead(_ResetPin); if (val == LOW) {_newElevation = _rotorElevation; _newAzimuth = _rotorAzimuth; } } // // update elevation rotor move // void updateElevationMove() { // calculate rotor move long rotorMoveEl = _newElevation - _rotorElevation; if (rotorMoveEl > 0) { elRotorMovement = " U "; elRotorMovement = elRotorMovement + String(_newElevation / 100); digitalWrite(_G5500DownPin, HIGH); digitalWrite(_G5500UpPin, LOW); } else { if (rotorMoveEl < 0) { elRotorMovement = " D "; elRotorMovement = elRotorMovement + String(_newElevation / 100); digitalWrite(_G5500UpPin, HIGH); digitalWrite(_G5500DownPin, LOW); } } } // // update azimuth rotor move // void updateAzimuthMove() { // calculate rotor move long rotorMoveAz = _newAzimuth - _rotorAzimuth; // adjust move if necessary if (rotorMoveAz > 18000) // adjust move if > 180 degrees { rotorMoveAz = rotorMoveAz - 180; } else { if (rotorMoveAz < -18000) // adjust move if < -180 degrees { rotorMoveAz = rotorMoveAz + 18000; } } if (rotorMoveAz > 0) { azRotorMovement = " R "; azRotorMovement = azRotorMovement + String(_newAzimuth / 100); digitalWrite(_G5500LeftPin, HIGH); digitalWrite(_G5500RightPin, LOW); } else { if (rotorMoveAz < 0) { azRotorMovement = " L "; azRotorMovement = azRotorMovement + String(_newAzimuth / 100); digitalWrite(_G5500RightPin, HIGH); digitalWrite(_G5500LeftPin, LOW); } } } // // read azimuth from G5500 // void readElevation() { long sensorValue = analogRead(_elevationInputPin); _rotorElevation = ((sensorValue * 10000) / _elScaleFactor) - _elAdZeroOffset; } // // read azimuth from G5500 // void readAzimuth() { long sensorValue = analogRead(_azimuthInputPin); _rotorAzimuth = ((sensorValue * 10000) / _azScaleFactor) - _azAdZeroOffset; } // // decode gs232 commands // void decodeGS232(char character) { switch (character) { case 'w': // gs232 W command case 'W': { { _gs232WActice = true; _gs232AzElIndex = 0; } break; } // numeric - azimuth and elevation digits case '0': case '1': case '2': case '3': case '4': case '5': case '6': case '7': case '8': case '9': { if ( _gs232WActice) { processAzElNumeric(character); } } default: { // ignore everything else } } } // // process az el numeric characters from gs232 W command // void processAzElNumeric(char character) { switch (_gs232AzElIndex) { case 0: // first azimuth character { _azimuthTemp = (character - 48) * 100; _gs232AzElIndex++; break; } case 1: { _azimuthTemp = _azimuthTemp + (character - 48) * 10; _gs232AzElIndex++; break; } case 2: // final azimuth character { _azimuthTemp = _azimuthTemp + (character - 48); _gs232AzElIndex++; // check for valid azimuth if ((_azimuthTemp * 100) > _maxRotorAzimuth) { _gs232WActice = false; _newAzimuth = 0L; _newElevation = 0L; } break; } case 3: // first elevation character { _elevationTemp = (character - 48) * 100; _gs232AzElIndex++; break; } case 4: { _elevationTemp = _elevationTemp + (character - 48) * 10; _gs232AzElIndex++; break; } case 5: // last elevation character { _elevationTemp = _elevationTemp + (character - 48); _gs232AzElIndex++; // check for valid elevation if ((_elevationTemp * 100) > _maxRotorElevation) { _gs232WActice = false; _newAzimuth = 0L; _newElevation = 0L; } else // both azimuth and elevation are ok { // set up for rotor move _newAzimuth = _azimuthTemp * 100; _newElevation = _elevationTemp * 100; _azimuthMove = true; _elevationMove = true; } break; } default: { // should never get here } } } // // display az el on display // void displayAzEl(long az, long el) { // display azimuth - filter A/D noise if (abs(_rotorAzimuth - _previousRotorAzimuth) > 50) { _previousRotorAzimuth = _rotorAzimuth; displayAz(az); } // display elevation - filter A/D noise if (abs(_rotorElevation - _previousRotorElevation) > 50) { _previousRotorElevation = _rotorElevation; displayEl(el); } } // // display elevation - pad to length 8 // error message if < 0 or > max // void displayEl(long el) { // clear elevation line lcdSerial lcd.setCursor(0, 1); // numero Colonna, Riga lcd.print(" "); // adjust value for display double elFloat = el; elFloat = elFloat / 100.0; // position lcd cursor on bottom line lcd.setCursor(0, 1); // numero Colonna, Riga // display elevation lcd.print("EL "); // pad with spaces if (elFloat < 10.0) { lcd.print(" "); } if (elFloat < 100.0) { lcd.print(" "); } lcd.print(elFloat, 1); lcd.print(elRotorMovement); } // // display azimuth - pad to length 8 // error message if < 0 or > max // void displayAz(long az) { // clear azimuth line lcd.setCursor(0, 0); lcd.print(" "); // adjust value for display double azFloat = az; azFloat = azFloat / 100.0; // position lcd cursor on top line lcd.setCursor(0, 0); // display azimuth lcd.print("AZ "); // pad with spaces if (azFloat < 10.0) { lcd.print(" "); } if (azFloat < 100.0) { lcd.print(" "); } lcd.print(azFloat, 1); lcd.print(azRotorMovement); } |