
ICOM IC-705’ten popüler QRP alıcı-vericisini uydu uyumlu hale getirebilmek için başka bir devre tasarladım ve buna karşılık gelen yazılımı geliştirdim.
Artık CI-V’yi Bluetooth üzerinden “QO-100 uydu işletimi” için kullanmak mümkün. Önceki versiyonlarda olduğu gibi, TX VFO, ayar düğmesini çevirerek otomatik olarak RX VFO’yu takip ediyor. Böylece iki VFO senkronize edilmiş olur.
İlgili RX ve TX osilatör frekanslarını girerek, hangi yukarı veya aşağı dönüştürücüyü kullanmak istediğinizi özgürce seçebilirsiniz. Örneğin 10m, 6m, 2m, 70cm, 23cm bantlarındaki dönüştürücüleri kullanabilirsiniz.
RX ve TX için sadece 2 farklı bandı kullanmanız yeterli.
İşte 2m bandından yukarı dönüştürücü (osilatör 2256MHz) ve 70cm bandına aşağı dönüştürücü (osilatör 10054MHz) için ICOM IC-705’li bir örnek.

SAT kutusu Bluetooth aracılığıyla vericiye bağlanır. SAT kutusuna 12V güç verildiğinde Arduino, dahili Bluetooth modülü aracılığıyla alıcı-vericiye CI-V komutları gönderir. Bu otomatik olarak uygun bantlara ayarlanır, USB çalışma modu ayarlanır, split modu etkinleştirilir, RF gücü önceden ayarlanmış bir değere ayarlanır. Frekans orta QO-100 işaretine ayarlanmıştır. Frekanslar Arduino tarafından CI-V arayüzü üzerinden okunur. Dönüştürülen downlink ve uplink frekansı görüntülenir.
RX-VFO üzerindeki alım frekansı değiştirildiğinde, Arduino CI-V üzerinden frekansı alır, dönüştürür ve hesaplanan downlink frekansını ekranda görüntüler. Buradan iletim frekansı hesaplanır ve TX-VFO’ya yazılır. Ortaya çıkan uplink frekansı ekranda gösterilir.
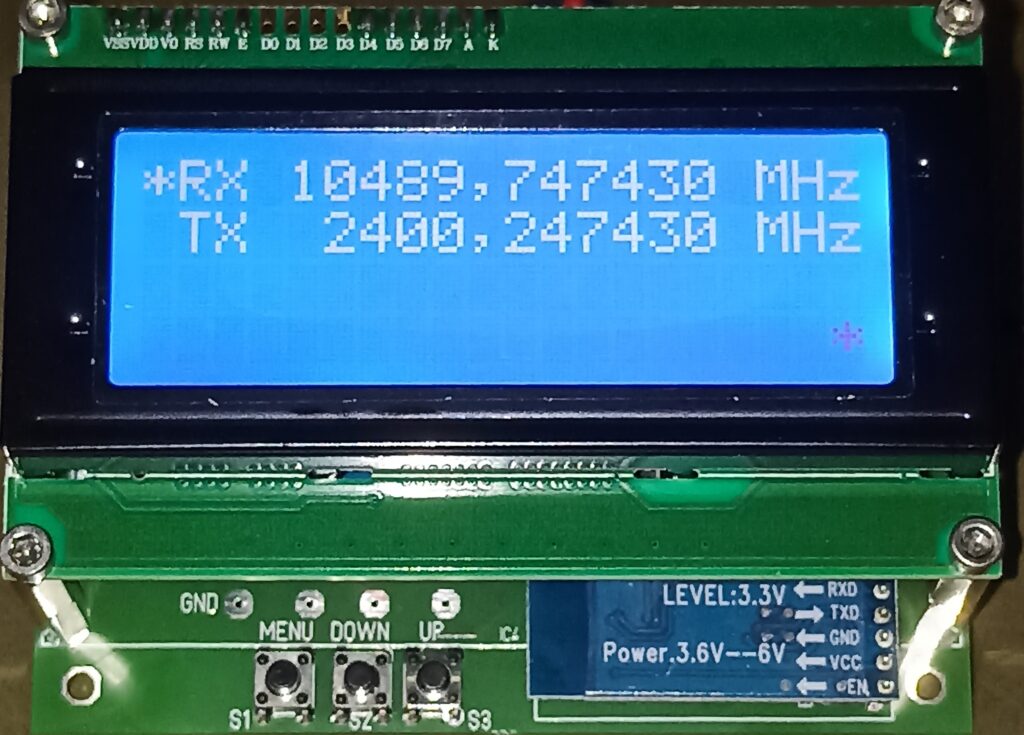
Frekans gösterimi:

Frekans gösteriminde, hesaplanan aşağı bağlantı frekansı üst satırda, hesaplanan yukarı bağlantı frekansı ise alt satırda gösterilir. RX veya TX tanımı önündeki sembol, mevcut iletim veya alım durumunu gösterir. Ekranın sağ alt köşesindeki titreşen sembol aktif bir CI-V bağlantısını gösterir.
Kurulum menüsü:
Cihazınızı açarken menü tuşuna basılı tutarak kurulum menüsüne girebilirsiniz.
Önemli !
Transceiver ayarlarında CI-V BAUDRATE 9600 olarak ayarlanmalı ve CI-V TRANSCEIVE kapalı olarak ayarlanmalıdır.
CI-V aygıt adresinin ayarlanması:
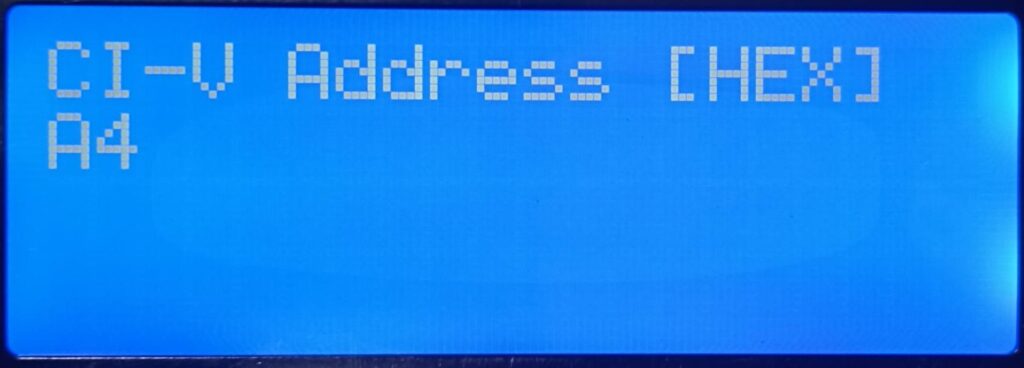
Öncelikle doğru CI-V adresinin ayarlanması gerekir.
Cihaz adresi yukarı veya aşağı tuşuna basılarak ayarlanabilir. SAT kutusunda ayarlanan adres, alıcı-vericideki adresle aynı olmalıdır, aksi takdirde SAT kutusu ile IC-705 arasında hiçbir iletişim kurulamaz.
(fabrika varsayılan adresi A4 )
Menü tuşuna tekrar basılarak çıkış gücü ayarlanabilir.
Çıkış gücünün ayarlanması:
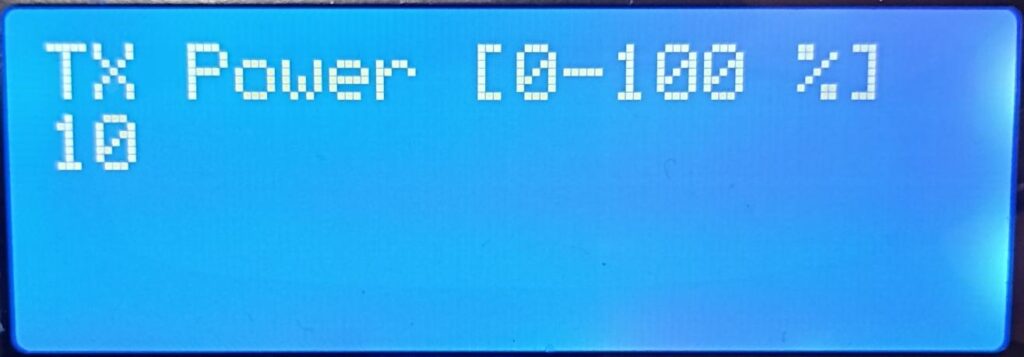
Çıkış gücü yukarı veya aşağı tuşuna basılarak ayarlanabilir.
Bu ayarlanan güç, her Bluetooth eşleştirmesi sırasında alıcı-vericiye gönderilir.
Tekrar menü tuşuna basarak adres ve güç ayarlarının yapıldığı hafıza alanına girilir.
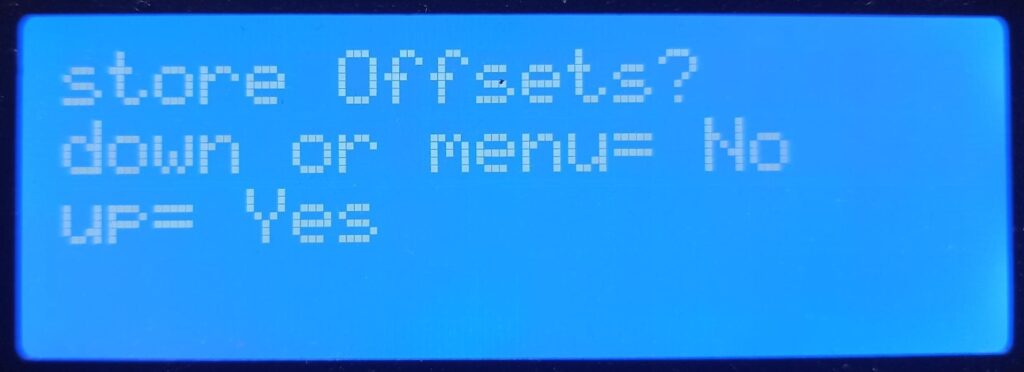
Daha önce ayarlanan cihaz adresi ve güç yukarı tuşuna basılarak EEPROM’a kaydedilebilir (güç kaynağı kesildikten sonra bile bu kalır) veya aşağı veya menü tuşuna basılarak kaydetmeden frekans göstergesine geçilebilir.
Menü kontrolü:
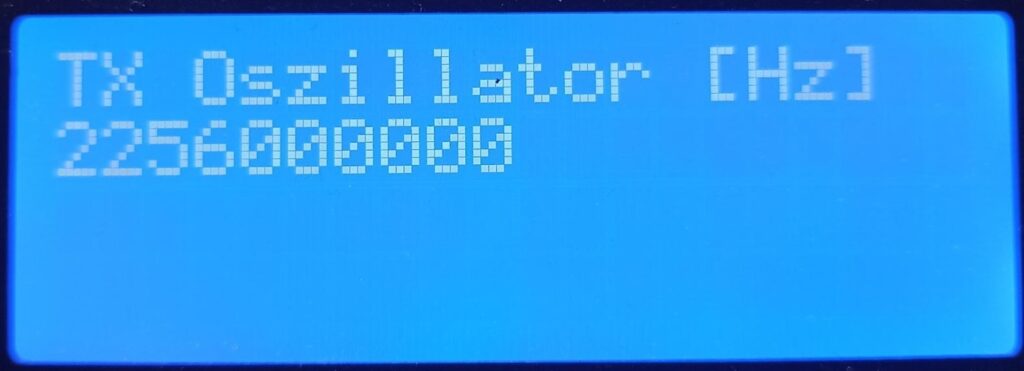
Menü tuşuna basarak TX osilatör frekansının ayar aralığına girilir.
Osilatör frekansı, yukarı veya aşağı düğmesine basılarak seçilen artışlarla (10 Hz – 100 MHz) ayarlanabilir.
Bu, SAT-BOX’ta görüntülenen TX frekansını kalibre eder.
Tehlike:
Değişiklik yaptıktan sonra mutlaka en sonda kaydetmeniz gerekmektedir çünkü ana ekranda sadece kaydedilen osilatör frekansı gösterilmektedir.
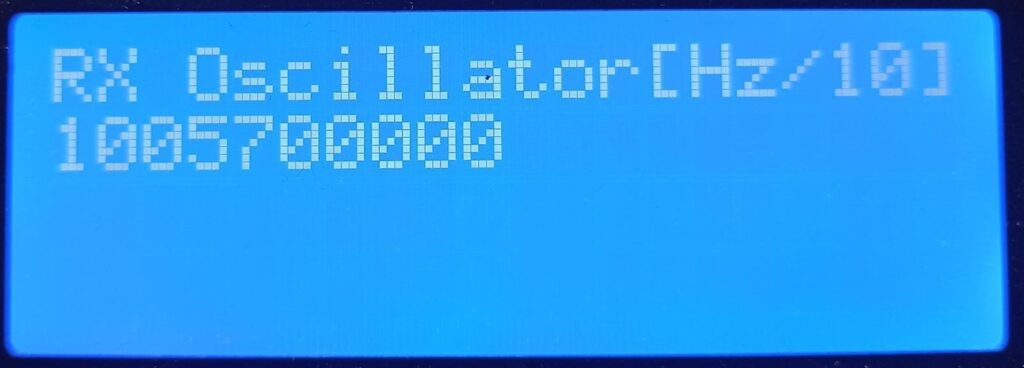
Menü tuşuna tekrar basarak RX osilatör frekansının ayar aralığına girilir.
Osilatör frekansı, yukarı veya aşağı düğmesine basılarak seçilen artışlarla (10 Hz – 100 MHz) ayarlanabilir.
Bu, SAT-BOX’ta görüntülenen RX frekansını kalibre eder.
Tehlike:
Değişiklik yaptıktan sonra mutlaka en sonda kaydetmeniz gerekmektedir çünkü ana ekranda sadece kaydedilen osilatör frekansı gösterilmektedir.
2m, 70cm, 23cm ama aynı zamanda 6m veya 10m’de dönüştürücüleri kullanmak için herhangi bir osilatör frekansı girilebilir.
(bkz. Excel dosyası “Frekans hesaplaması”)
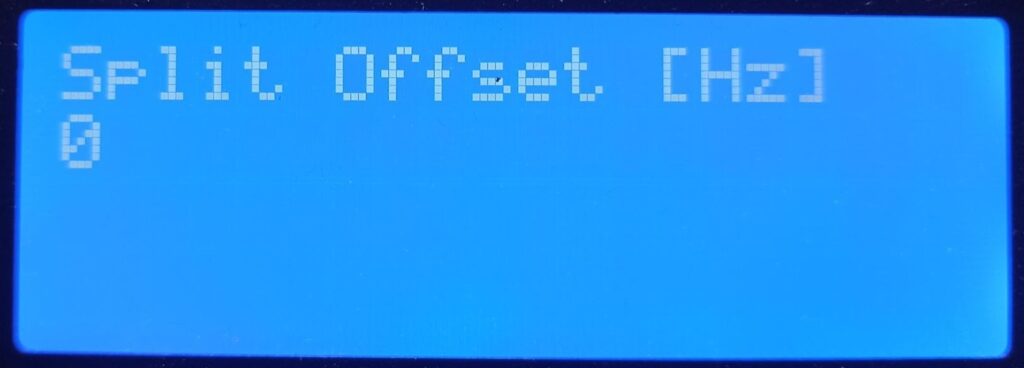
Menü düğmesine tekrar basarak bölünmüş ofsetin ayar alanına girersiniz
Bölünmüş modda yayın yapan istasyonların da kullanılabilmesini sağlamak için, bölünmüş ofset ayarlama menüsü mevcuttur. Burada sadece TX frekansı değiştiriliyor.
Örnek: Alınan istasyon “5 yukarı” gösteriyorsa, Split Offset ayarı 5000 Hz olarak girilebilir. TX sinyali daha sonra 5 KHz daha yüksek olarak iletilir.
Veya alınan istasyon “10 down” gösteriyorsa, Split Offset ayarı -10000 Hz olarak girilebilir. TX sinyali daha sonra 10 KHz daha düşük iletilir.
Bir duyuru:
Yeniden başlatma veya sıfırlama sonrasında, bölme ofseti tekrar 0’a ayarlanır.
Not: Bölünmüş ofset EEPROM’da saklanmaz!
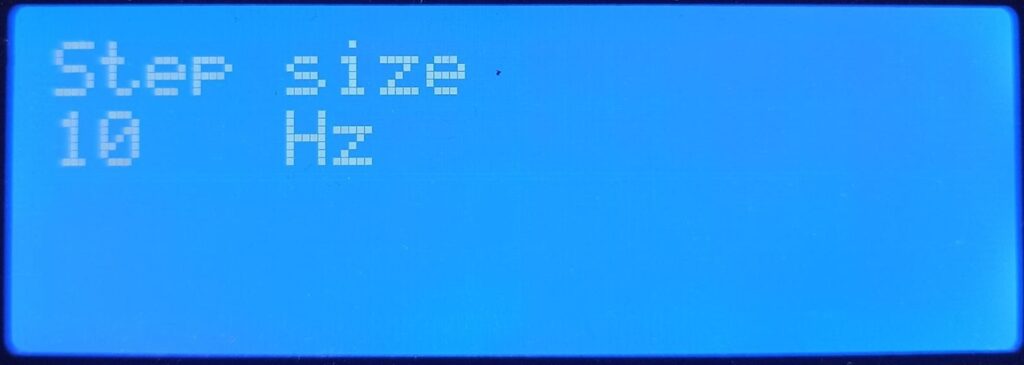
Tekrar menü tuşuna basarak adım boyutu ayar alanına girilir.
Varsayılan adım boyutu 100Hz’dir.
10 Hz ile 100 MHz aralığında yukarı tuşuna basılarak adım büyüklüğü 10 katına kadar artırılabilir veya aşağı tuşuna basılarak adım büyüklüğü 10 katına kadar azaltılabilir.
Burada ayarlanan adım boyutu tüm menüler için geçerlidir.
Tekrar menü tuşuna basarak osilatör frekanslarının hafıza alanına girilir.
Daha önce ayarlanmış olan RX ve TX osilatör frekansları yukarı tuşuna basılarak EEPROM’a kaydedilebilir (güç kaynağı kesildikten sonra bile bunlar kalır) veya menü veya aşağı tuşuna basılarak kaydetmeden frekans göstergesine dönülebilir.
Not: Bölünmüş ofset EEPROM’da saklanmaz!
Depolanan RX ve TX osilatör frekansları, yeniden başlatma veya sıfırlama sonrasında bile EEPROM’dan okunur ve frekans göstergesine dahil edilir. Frekans göstergesi artık kalibre edildi.
Frekans göstergesinde yukarı ve aşağı tuşlarına aynı anda uzun süre basıldığında sıfırlama tetiklenir. SAT-BOX kontrol cihazı yeniden başlatılır ve başlatma dizisi görüntülendikten sonra frekans orta işarete geri ayarlanır. Alıcı-verici üzerinde önceden ayarlanmış güç ayarı yapılır. Ayarlanmış olabilecek herhangi bir bölünme ofseti de 0’a sıfırlanacak ve adım boyutu 100 Hz’e sıfırlanacaktır.
Ayrıca menü gezintisi için ilgili kullanım talimatlarına da bakın ( yazılım indirme zip dosyasında yer almaktadır )
Talep üzerine boş panolar da eklenebilir.
Yeniden yapılanmada başarılar dilerim.
Elektronik veya mikrodenetleyici programlama ile daha az uğraşmak isteyen YL’ler veya OM’ler için:
Talep üzerine, montajı tamamlanmış, programlanmış modüller de mevcuttur.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 646 647 648 649 650 651 652 653 654 655 656 657 658 659 660 661 662 663 664 665 666 667 668 669 670 671 672 673 674 675 676 677 678 679 680 681 682 683 684 685 686 687 688 689 690 691 692 693 694 695 696 697 698 699 700 701 702 703 704 705 706 707 708 709 710 711 712 713 714 715 716 717 718 719 720 721 722 723 724 725 726 727 728 729 730 731 732 733 734 735 736 737 738 739 740 741 742 743 744 745 746 747 748 749 750 751 752 753 754 755 756 757 758 759 760 761 762 763 764 765 766 767 768 769 770 771 772 773 774 775 776 777 778 779 780 781 782 783 784 785 786 787 788 789 790 791 792 793 794 795 796 797 798 799 800 801 802 803 804 805 806 807 808 809 810 811 812 813 814 815 816 817 818 819 820 821 822 823 824 825 826 827 828 829 830 831 832 833 834 835 836 837 838 839 840 841 842 843 844 845 846 847 848 849 850 851 852 853 854 855 856 |
/* Erstellt: 2024-10-26 * Version V1.1 * Autor: Roland Kaiser, OE2ROL * Geschrieben für Arduino Nano ATmega 328P(Old Bootloader) * Der Autor übernimmt keine Haftung etwaiger Folgeschäden an Transceivern oder dgl. * Diese Software ist für den eigenen privaten Gebrauch frei verfügbar, jedoch nicht für kommerzielle Zwecke ohne Genehmigung des Autors. * Veränderungen und Verbesserungen der Software bitte wieder an den Autor Roland Kaiser OE2ROL (roland.kaiser@sbg.at) senden. * Die Software wurde am ICOM IC-705 getestet. * Funktionsweise: o Der Transceiver wird bei einer Bluetoothverbindung automatisch in den entsptechenden "SAT Mode" gebracht (beide VFO´s in die vorgegebene QRG, Betriebsart USB, Splitmode) o Der RX VFO wird gelesen, davon wird ein vorgegebener Versatz subtrahiert und verzögert automatisch in den TX VFO geschrieben. o Dies passiert vollautomatisch nur durch verändern des RX VFO´s. o Die für QO-100 umgerechnete RX und TX Frequenz wird auf einem LCD Display angezeigt. o Menüsteuerung in 5 Ebenen: o Setzen der RX-Oszillatorfrequenz mit einstellbarer Schrittweite zum Anpassen der Oszillatorfrequenz des Upconverters o Setzen der TX-Oszillatorfrequenz mit einstellbarer Schrittweite zum Anpassen der Oszillatorfrequenz des Downconverters o Setzen eines Split-Offsets mit eingestellbarer Schrittweite für Stationen die im Split-Betrieb arbeiten (hier wird nur die Sendefrequenz verändert) o Setzen der Schrittweite für alle Einstellungen o Speichern der RX/TX Oszillatorfrequenzen im internen EEPROM. o Nach dem Speichern der Oszillatorfrequenzen wird nach einem Neustart der SAT BOX die Frequenz auf die mittlere QO-100 Bake gestellt. o Die RX und TX Oszillatorfrequenzen bleiben auch ohne Stromversorgung gespeichert, der Split Offset wird wieder auf 0 gesetzt. o Ein Softwarereset kann durch gleichzeitiges betätigen der Up- und Down-Taste ausgelöst werden. (nur in der Frequenzanzeige) o Setup Menüsteuerung in 3 Ebenen: o Die CI-V Adresse kann im Setupmenü gesetzt werden (halten der Menütaste beim Start) z.B. "A4" bei ICOM IC-705 und kann im EEPROM gespeichert werden. o Die Ausgangsleistung kann im Setupmenü gesetzt werden (halten der Menütaste beim Start) z.B. "50%" und kann im EEPROM gespeichert werden. o Speichern der CI-V Adresse und der Ausgangsleistung in % im internen EEPROM. o Statusanzeige RX-TX im Display mittels Symbol vor der RX bzw. TX Beschriftung. o Statusanzeige einer aktiven CI-V Verbindung zum Transceiver im Display mittels blinkenden Symbol rechts unten. Änderungsübersicht: V1.0 initiale Version V1.1 Leistungseinstellung im Setup Menü hinzugefügt Anschlussbelegung der Ports: CAT port GND -> Arduino GND CAT port TX,RX -> Arduino pin 11,12 Tastenport up -> Arduino Pin A3 Tastenport down -> Arduino Pin A4 Tastenport Menü -> Arduino Pin A5 Die Tasten werden gegen Masse angeschlossen. BTconnPin -> Arduino Pin A0 Display: Arduino: 4(RS) -> 7 6(E) -> 10 11(D4) -> 5 12(D5) -> 4 13(D6) -> 6 14(D7) -> 2 */ #include <LiquidCrystal.h> #include <SoftwareSerial.h> #include <EEPROM.h> uint32_t freq; // Frequenz uint32_t RXfreq; // umgerechnete Empfangsfrequenz uint32_t TXfreq; // umgerechnete Sendefrequenz uint32_t TXosz; // TX Oszillatorfrequenz uint32_t RXosz; // RX Oszillatorfrequenz uint32_t shift; // RX-TX Frequenzversatz byte civadr = 0; // CI-V Adresse uint32_t VFOAfreq = 0; // RX Frequenz am Transceiver uint32_t VFOBfreq = 0; // TX Frequenz am Transceiver const uint32_t decMulti[] = {1000000000, 100000000, 10000000, 1000000, 100000, 10000, 1000, 100, 10, 1}; // Multiplikatorarray für Frequenzberechnung byte lcdNumCols = 20; // LCD Anzahl der Stellen uint32_t freqmem; // Frequenzzwischenspeicher long RIT = 0; // RIT long Splitoffset =0; // Split Offset unsigned long previousMillis1 = 0; // Timer1 auf 0 setzen unsigned long previousMillis2 = 0; // Timer2 auf 0 setzen const long interval = 3500; // Verzögerungszeit [ms] nachziehen des VFOB const int BTconnPin = A0; // Pin für BT Verbindungserkennung const int menuPin = A5; // Pin für Menue Taste const int downpin = A4; // Pin für Up Taste const int uppin = A3; // Pin für Down Taste int menuPushCounter = 0; // Menütastenzähler int menuState = 0; // Menüstatus int BTstate; // BT Status int lastmenuState = 0; // letzter Menü Status boolean menubool = false; // Menü initial deaktivieren int up; // up Taste int down; // Taste down int menucounter = 0; // Menü Zähler int initflag = 0; // Initflag uint32_t sw = 10; // Schrittweite zum Einstellen der Oszillatorfrequenzen im Menü Hz/10 byte Z_E; // BCD Code 10 Hz, 1 Hz byte K_H; // BCD Code 1 KHz, 100 Hz byte HK_ZK; // BCD Code 100 KHz, 10 KHz byte ZM_M; // BCD Code 10 MHz, 1 MHz byte G_HM; // BCD Code 1 GHz, 100 MHz int txPower; // TX Power in % LiquidCrystal lcd(7, 10, 5, 4, 6, 2); // LCD Anschlussbelegung SoftwareSerial CAT(11, 12); // RX, TX Pin CAT Schnittstelle // ******************************************SETUP************************************************************* void setup(){ CAT.begin(9600); // CAT Schnittstelle initialisieren Serial.begin(9600); // Serial Monitor Init lcd.begin(2, lcdNumCols); // LCD init lcd.clear(); // LCD löschen delay(100); // Verzögerung pinMode(menuPin, INPUT); // Init für die Tasten Pins digitalWrite(menuPin, HIGH); // Init für die Tasten Pins pinMode(downpin, INPUT); // Init für die Tasten Pins digitalWrite(downpin, HIGH); // Init für die Tasten Pins pinMode(uppin, INPUT); // Init für die Tasten Pins digitalWrite(uppin, HIGH); // Init für die Tasten Pins pinMode(BTconnPin, INPUT); // Init für BT Pin menuState = digitalRead(menuPin); // Auslesen der Menütaste beim Start if (menuState == LOW){setupmenu();} // wenn während dem Start die Menü Taste betätigt wird startet das Setupmenü civadr = EEPROM.get(20, civadr); // CI-V Adresse aus dem eeprom lesen // *****************************************Transceiver Settings setzen*************************************** select_VFOB(); // VFOB auswählen delay(20); // Verzögerung 20ms select_Mode_USB(); // Umschalten auf Mode USB delay(20); // Verzögerung 20ms RXosz = EEPROM.get(10, RXosz); // RX Oszillatorfrequenz [Hz/10] aus dem EEPROM lesen select_VFOA(); // VFOA auswählen delay(20); // Verzögerung 20ms select_Mode_USB(); // Umschalten auf Mode USB delay(20); // Verzögerung 20ms select_Split(); // Umschalten auf Split Mode delay(20); // Verzögerung 20ms txPower = EEPROM.get(30, txPower); // TX Power aus dem EEPROM lesen delay(20); // Verzögerung 20ms set_TXPower(txPower); // TX Power setzen delay(20); // Verzögerung 20ms freq = (1048975000-RXosz)*10; // auf die mittlere QO-100 Bakenfrequenz stellen write_freq(); // Frequenz in den Transceiver schreiben // **************************************Initmeldung*********************************************************** lcd.clear(); // LCD löschen lcd.setCursor(0, 0); // 1. Zeichen, 1. Zeile lcd.print("** QO-100 SAT BOX **"); // schreiben lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print(" **** OE2ROL **** "); // schreiben lcd.setCursor(18, 3); // 1. Zeichen, 4. Zeile lcd.print("ICOM IC-705 V1.1"); // schreiben delay(2000); // Verzögerung lcd.clear(); // LCD löschen EEPROM.get(0, TXosz); if(TXosz == -1){ // Wird nur bei der 1. Initialisierung eines neuen Arduinos verwendet TXosz=2256000000; // TX Oszillatorfrequenz [Hz] (z.B. 2256MHz) RXosz=1005400000; // RX Oszillatorfrequenz [Hz/10] (z.B. 10,054GHz) civadr=0xA4; // CI-V Adresse [HEX] (z.B. A4 Standardadresse ICOM IC-705) txPower=1; // TX Power 1% EEPROM.put(0, TXosz); // Wert TXosz ins EEPROM schreiben (Adresse 0) delay(200); // Verzögerung EEPROM.put(10, RXosz); // Wert RXosz ins EEPROM schreiben (Adresse 10) delay(200); // Verzögerung EEPROM.put(20, civadr); // Wert ins eeprom schreiben (Adresse 20) delay(200); // Verzögerung EEPROM.put(30, txPower); // Wert ins eeprom schreiben (Adresse 30) delay(200); // Verzögerung } } // *************************************Statusanzeige der CI-V Kommunikation*********************************************************** void puls(){ unsigned long currentMillis = millis(); // Wert für aktuellen Timer setzen if (currentMillis - previousMillis1 >= 250) // wenn Differenz des aktuellen Timers zu Startwert des Timers > 250ms ist, dann: { lcd.setCursor(37, 3); // Cursor setzen lcd.print("*"); // Zeichen ausgeben if (currentMillis - previousMillis1 >= 500){ // wenn Differenz des aktuellen Timers zu Startwert des Timers > 500ms ist, dann: lcd.setCursor(37, 3); // Cursor setzen lcd.print(" "); // Zeichen ausgeben previousMillis1 = currentMillis; // Timerstartwert auf Wert des aktuellen Timers setzen } } } // ********************************************Aufbau einer Bluetoothverbindung********************************************************** void Bluetoothstate(){ BTstate = digitalRead(BTconnPin); // Auslesen des BT Pins if (BTstate == LOW){ // wenn BT nicht verbunden ist asm volatile (" jmp 0"); // Software Reset } else{ if (initflag == 0){ // wenn BT verbunden ist setup(); // erneute Ausführung von Setup initflag = 1; // Flag auf 1 setzen, damit Setup nach der ersten BT Verbindung nur einmal ausgeführt wird } } } // ********************************************LCD Beschriftung setzen****************************************************************** void LCDBeschriftung() { lcd.setCursor(1, 0); // 2. Zeichen, 1. Zeile lcd.print("RX"); // schreiben lcd.setCursor(17, 0); // 18. Zeichen, 1. Zeile lcd.print("MHz"); // schreiben lcd.setCursor(1, 1); // 2. Zeichen, 2. Zeile lcd.print("TX"); // schreiben lcd.setCursor(17, 1); // 18. Zeichen, 2. Zeile lcd.print("MHz"); // schreiben } //*************************************************************RX_TX Beschriftung******************************************************* void RXTXBeschriftung() { if (VFOAfreq != VFOBfreq) { // wenn VFOAfreq ungleich VFOBfreq ist (RX) dann lcd.setCursor(0, 0); // 1. Zeichen, 1. Zeile lcd.print("*"); // schreiben } else{ // sonst lcd.setCursor(0, 0); // 1. Zeichen, 1. Zeile lcd.print(" "); // schreiben } if (VFOAfreq == VFOBfreq) { // wenn VFOAfreq gleich VFOBfreq ist (TX) dann lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print("*"); // schreiben } else{ // sonst lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print(" "); // schreiben } } //***************************************************************TX Power setzen********************************************************* // "00" => 0x00 // "99" => 0x99 byte str2Hex(String value) { int z = value.substring(0,1).toInt(); return( z*6 + value.toInt() ); } // 0 - 100 set_TXPower void set_TXPower(int txPower) { //(int percentage=77) // "00000" - "0000255" String value = "0000" + String(int( ( 255.0/100.0 ) * txPower )); // Prozentwert in Hexwert umrechnen // "0001" => "0001" // "0000255" => "0255" value = value.substring(value.length()-4,value.length()); // in 4 stelligen Hexwert umwandeln // "02" => 0x02 // in 4 stelligen Hexwert in 2x 2 stelligen Hexwert umwandeln int byte0 = str2Hex( value.substring(0,2) ); // 1. 2 Stellen // "55" => 0x55 int byte1 = str2Hex( value.substring(2,4) ); // 2. 2 Stellen // 0x00 0x00 => 0 // 0x02 0x55 => 255 uint8_t power[] = {0xFE, 0xFE, civadr, 0x00, 0x14, 0x0A, byte0, byte1, 0xFD}; // CAT Kommando zum setzen der TX Power (7.Byte 0x00 0x00 = Minimum bis 8.Byte 0x02 0x55 = Maximum) // Formel 255/100x(Leistung in %) und auf Ganze runden (z.B.30% = 255/100*30 = 76,5 ~ 77 = 0x00, 0x77) for (uint8_t i = 0; i < sizeof(power); i++) { // Zählschleife 0 - Grösse des Schreibarrays CAT.write(power[i]); // CAT Kommando senden } delay(20); // Verzögerung 20 ms } // *********************************************Sende- und Empangsfrequenzen berechnen*************************************************** void calculateFrequency() { TXosz = EEPROM.get(0, TXosz); // TX Oszillatorfrequenz [Hz] aus dem eeprom lesen (Adresse 0) RXosz = EEPROM.get(10, RXosz); // RX Oszillatorfrequenz [Hz/10] aus dem eeprom lesen (Adresse 10) shift=808950000; // QO-100 RX-TX Versatz [Hz/10] = TX 10489,750MHz RX 2400,250MHz = RX-TX shift 8089,500MHz TXfreq=VFOBfreq+TXosz; // Berechnung der SAT Sendefrequenz [Hz](Sendefrequenz + TX Oszillatorfrequenz) RXfreq=(VFOAfreq/10)+RXosz; // Berechnung der SAT Empfangsfrequenz [Hz/10](Empfangsfrequenz + RX Oszillatorfrequenz) } // *************************************************Mode USB am Transceiver auswählen**************************************************** void select_Mode_USB() { uint8_t VFOA[] = {0xFE, 0xFE, civadr, 0x00, 0x06, 0x01, 0xFD}; // CAT Kommando zum Umschalten auf USB for (uint8_t i = 0; i < sizeof(VFOA); i++) { // Zählschleife 0 - Grösse des Schreibarrays CAT.write(VFOA[i]); // CAT Kommando senden } delay(20); // Verzögerung 20 ms } // *************************************************Split Mode am Transceiver auswählen************************************************** void select_Split() { uint8_t VFOA[] = {0xFE, 0xFE, civadr, 0x00, 0x0F, 0x01, 0xFD}; // CAT Kommando zum Umschalten auf Split for (uint8_t i = 0; i < sizeof(VFOA); i++) { // Zählschleife 0 - Grösse des Schreibarrays CAT.write(VFOA[i]); // CAT Kommando senden } delay(20); // Verzögerung 20 ms } // *************************************************VFOA am Transceiver auswählen******************************************************** void select_VFOA() { uint8_t VFOA[] = {0xFE, 0xFE, civadr, 0x00, 0x07, 0x00, 0xFD}; // CAT Kommando zum Umschalten auf VFOA for (uint8_t i = 0; i < sizeof(VFOA); i++) { // Zählschleife 0 - Grösse des Schreibarrays CAT.write(VFOA[i]); // CAT Kommando senden } delay(20); // Verzögerung 20 ms } // ***********************************************VFOB am Transceiver auswählen********************************************************** void select_VFOB() { uint8_t VFOB[] = {0xFE, 0xFE, civadr, 0x00, 0x07, 0x01, 0xFD}; // CAT Kommando zum Umschalten auf VFOB for (uint8_t i = 0; i < sizeof(VFOB); i++) { // Zählschleife 0 - Grösse des Schreibarray CAT.write(VFOB[i]); // CAT Kommando senden } delay(20); // Verzögerung 20 ms } // ***********************************************TX Frequenz in VFOB schreiben********************************************************** void write_TXfreq() { select_VFOB(); // VFOB Frequenz auswählen delay(20); // Verzögerung 20 ms freq = VFOBfreq; // Frequenz in VFOB Variable schreiben write_freq(); // Funktion aufrufen zum Schreiben der Frequenz in den Transceiver } // *************************************************Frequenz in Transceiver schreiben**************************************************** void write_freq() { Z_E = decToBcd(freq%100); // 10 Hz, 1 Hz K_H = decToBcd(freq/100%100); // 1 KHz, 100 Hz HK_ZK = decToBcd(freq/10000%100); // 100 KHz, 10 KHz ZM_M = decToBcd(freq/1000000%100); // 10 MHz, 1 MHz G_HM = decToBcd(freq/100000000%100); // 1 GHz, 100 MHz uint8_t writefreq[] = {0xFE, 0xFE, civadr, 0x00, 0x05, Z_E, K_H, HK_ZK, ZM_M, G_HM, 0xFD}; // CAT Kommando zum schreiben der Frequenz z.B. FE FE civadr 00 05 <00 80 20 44 01> FD = 0144208000 Hz for (uint8_t i = 0; i < sizeof(writefreq); i++) { // Zählschleife 0 - Grösse des Schreibarray CAT.write(writefreq[i]); // CAT Kommando senden } delay(20); // Verzögerung 20 ms } // ******************************************dezimal in BCD Code umwandeln***************************************************************** byte decToBcd(byte val) { return( (val/10*16) + (val%10) ); // 2 stellige Dezimalzahl in BCD Code umwandeln } // ************************************VFOB nachziehen, nur wenn RX Frequenz am Transceiver geändert wird********************************** void VFOB_nachziehen1() { // nur wenn VFOAfreq > VFOBfreq ist int dly = 5; // Verzögerung für x millisekunden zwischen den Kommandos VFOBfreq=(VFOAfreq/10+RXosz-shift)*10-TXosz-RIT+Splitoffset; // VFO Freq. zum Senden berechnen [Hz/10](Empfangsfrequenz+RX Oszillatorfrequenz-shift-TX Oszillatorfrequenz) um -RIT und +Splitoffset korrigieren unsigned long currentMillis = millis(); // Wert für aktuellen Timer setzen if (currentMillis - previousMillis2 >= interval) // wenn Differenz des aktuellen Timers zu Startwert des Timers > Verzögerungszeit ist, dann: { previousMillis2 = currentMillis; // Timerstartwert auf Wert des aktuellen Timers setzen if (TXfreq > 2399000000) { // Zur Unterdrückung einer falschen Frequenzübergabe if (freqmem!=VFOBfreq) // Nur wenn der Zwischenspeicher nicht der VFOA-Frequenz entspricht, dann: { write_TXfreq(); // TX Frequenz in den VFOB schreiben delay(dly); // Verzögerung freqmem=VFOBfreq; // TX Frequenz in den Zwischenspeicher schreiben delay(dly); // Verzögerung } } } } // *************************************Berechnete TX Frequenz ins Display schreiben******************************************************* void print_TXfreq1() { // nur wenn VFOAfreq > VFOBfreq ist if (TXfreq > 2399000000) { // Zur Unterdrückung einer falschen Frequenzanzeige bei manueller Wahl des VFOB lcd.setCursor(5, 1); lcd.print(TXfreq/1000000000%10); // Tx 1G Stelle ausgeben lcd.setCursor(6, 1); lcd.print(TXfreq/100000000%10); // Tx 100M Stelle ausgeben lcd.setCursor(7, 1); lcd.print(TXfreq/10000000%10); // Tx 10M Stelle ausgeben lcd.setCursor(8, 1); lcd.print(TXfreq/1000000%10); // Tx 1M Stelle ausgeben lcd.setCursor(9, 1); lcd.print(","); // , ausgeben lcd.setCursor(10, 1); lcd.print(TXfreq/100000%10); // Tx 100k Stelle ausgeben lcd.setCursor(11, 1); lcd.print(TXfreq/10000%10); // Tx 10k Stelle ausgeben lcd.setCursor(12, 1); lcd.print(TXfreq/1000%10); // Tx 1k Stelle ausgeben lcd.setCursor(13, 1); lcd.print(TXfreq/100%10); // Tx 100Hz Stelle ausgeben lcd.setCursor(14, 1); lcd.print(TXfreq/10%10); // Tx 10Hz Stelle ausgeben lcd.setCursor(15, 1); lcd.print(TXfreq%10); // Tx 1Hz Stelle ausgeben } } // *************************************Berechnete RX Frequenz ins Display schreiben****************************************************** void print_RXfreq1() { // nur wenn VFOAfreq > VFOBfreq ist if (RXfreq > 1048800000) { // Zur Unterdrückung einer falschen Frequenzanzeige beim Senden lcd.setCursor(2, 2); lcd.print(RXfreq/1000000000%10); // Rx 10G Stelle ausgeben lcd.setCursor(3, 2); lcd.print(RXfreq/100000000%10); // Rx 1G Stelle ausgeben lcd.setCursor(4, 2); lcd.print(RXfreq/10000000%10); // Rx 100M Stelle ausgeben lcd.setCursor(5, 2); lcd.print(RXfreq/1000000%10); // Rx 10M Stelle ausgeben lcd.setCursor(6, 2); lcd.print(RXfreq/100000%10); // Rx 1M Stelle ausgeben lcd.setCursor(7, 2); lcd.print(","); // , ausgeben lcd.setCursor(8, 2); lcd.print(RXfreq/10000%10); // Rx 100k Stelle ausgeben lcd.setCursor(9, 2); lcd.print(RXfreq/1000%10); // Rx 10k Stelle ausgeben lcd.setCursor(10, 2); lcd.print(RXfreq/100%10); // Rx 1k Stelle ausgeben lcd.setCursor(11, 2); lcd.print(RXfreq/10%10); // Rx 100Hz Stelle ausgeben lcd.setCursor(12, 2); lcd.print(RXfreq%10); // Rx 10Hz Stelle ausgeben lcd.setCursor(13, 2); lcd.print(RXfreq%1); // Rx 1Hz Stelle ausgeben } } // ************************************VFOB nachziehen, nur wenn RX Frequenz am Transceiver geändert wird********************************** void VFOB_nachziehen2() { // nur wenn VFOAfreq < VFOBfreq ist int dly = 5; // Verzögerung für x millisekunden zwischen den Kommandos VFOBfreq=(VFOAfreq/10+RXosz-shift)*10-TXosz-RIT+Splitoffset; // VFO Freq. zum Senden berechnen [Hz/10](Empfangsfrequenz+RX Oszillatorfrequenz-shift-TX Oszillatorfrequenz) um -RIT und +Splitoffset korrigieren unsigned long currentMillis = millis(); // Wert für aktuellen Timer setzen if (currentMillis - previousMillis2 >= interval) // wenn Differenz des aktuellen Timers zu Startwert des Timers > Verzögerungszeit ist, dann: { previousMillis2 = currentMillis; // Timerstartwert auf Wert des aktuellen Timers setzen if (TXfreq < 2401000000) { // Zur Unterdrückung einer falschen Frequenzübergabe if (freqmem!=VFOBfreq) // Nur wenn der Zwischenspeicher nicht der VFOA-Frequenz entspricht, dann: { write_TXfreq(); // TX Frequenz in den VFOB schreiben delay(dly); // Verzögerung freqmem=VFOBfreq; // TX Frequenz in den Zwischenspeicher schreiben delay(dly); // Verzögerung } } } } // *************************************Berechnete TX Frequenz ins Display schreiben******************************************************* void print_TXfreq2() { // nur wenn VFOAfreq < VFOBfreq ist if (TXfreq < 2401000000) { // Zur Unterdrückung einer falschen Frequenzanzeige bei manueller Wahl des VFOB lcd.setCursor(5, 1); lcd.print(TXfreq/1000000000%10); // Tx 1G Stelle ausgeben lcd.setCursor(6, 1); lcd.print(TXfreq/100000000%10); // Tx 100M Stelle ausgeben lcd.setCursor(7, 1); lcd.print(TXfreq/10000000%10); // Tx 10M Stelle ausgeben lcd.setCursor(8, 1); lcd.print(TXfreq/1000000%10); // Tx 1M Stelle ausgeben lcd.setCursor(9, 1); lcd.print(","); // , ausgeben lcd.setCursor(10, 1); lcd.print(TXfreq/100000%10); // Tx 100k Stelle ausgeben lcd.setCursor(11, 1); lcd.print(TXfreq/10000%10); // Tx 10k Stelle ausgeben lcd.setCursor(12, 1); lcd.print(TXfreq/1000%10); // Tx 1k Stelle ausgeben lcd.setCursor(13, 1); lcd.print(TXfreq/100%10); // Tx 100Hz Stelle ausgeben lcd.setCursor(14, 1); lcd.print(TXfreq/10%10); // Tx 10Hz Stelle ausgeben lcd.setCursor(15, 1); lcd.print(TXfreq%10); // Tx 1Hz Stelle ausgeben } } // *************************************Berechnete RX Frequenz ins Display schreiben****************************************************** void print_RXfreq2() { // nur wenn VFOAfreq < VFOBfreq ist if (RXfreq < 1049100000) { // Zur Unterdrückung einer falschen Frequenzanzeige beim Senden lcd.setCursor(2, 2); lcd.print(RXfreq/1000000000%10); // Rx 10G Stelle ausgeben lcd.setCursor(3, 2); lcd.print(RXfreq/100000000%10); // Rx 1G Stelle ausgeben lcd.setCursor(4, 2); lcd.print(RXfreq/10000000%10); // Rx 100M Stelle ausgeben lcd.setCursor(5, 2); lcd.print(RXfreq/1000000%10); // Rx 10M Stelle ausgeben lcd.setCursor(6, 2); lcd.print(RXfreq/100000%10); // Rx 1M Stelle ausgeben lcd.setCursor(7, 2); lcd.print(","); // , ausgeben lcd.setCursor(8, 2); lcd.print(RXfreq/10000%10); // Rx 100k Stelle ausgeben lcd.setCursor(9, 2); lcd.print(RXfreq/1000%10); // Rx 10k Stelle ausgeben lcd.setCursor(10, 2); lcd.print(RXfreq/100%10); // Rx 1k Stelle ausgeben lcd.setCursor(11, 2); lcd.print(RXfreq/10%10); // Rx 100Hz Stelle ausgeben lcd.setCursor(12, 2); lcd.print(RXfreq%10); // Rx 10Hz Stelle ausgeben lcd.setCursor(13, 2); lcd.print(RXfreq%1); // Rx 1Hz Stelle ausgeben } } // ********************************************RX Frequenz aus dem Transceiver lesen (VFOA)*************************************************** void read_RXfreq() { // Frequenz vom Transceiver auslesen und in Variable (freq) schreiben select_VFOA(); // VFOA Frequenz auswählen delay(100); // Verzögerung 100 ms uint8_t freq_buffer[12]; // Array zum Einlesen der Main Frequenz uint8_t req[] = {0xFE, 0xFE, civadr, 0x00, 0x03, 0xFD}; // CAT Kommando zum auslesen der Frequenz for (uint8_t i = 0; i < sizeof(req); i++) { // Grösse des Schreibarrays CAT.write(req[i]); // CAT Kommando schreiben } delay(100); // Verzögerung 100 ms while (!CAT.available()); // auf Serial Port warten while (CAT.available() > 0) { // wenn Serial Port verfügbar puls(); // Statusanzeige der CI-V Kommunikation ausgeben for (int j = 0; j < 12; j++) { // Zählschleife 0-12 delay(10); // Verzögerung 10 ms freq_buffer[j] = CAT.read(); // Zeichen vom Serial Port schrittweise in das Array schreiben if (freq_buffer[j] == 0xFD){ // wenn 0xFD im Buffer steht break; // aus der Schleife aussteigen j = 0; // Arrayindexzähler auf 0 setzen } VFOAfreq = 0; // Variable für RX Frequenz auf 0 setzen } // FE FE 00 A2 03 <00 80 70 35 04> FD = 0435708000 Hz for (uint8_t k = 0; k < 5; k++) { // Zählschleife 0-5 VFOAfreq += (freq_buffer[9 - k] >> 4) * decMulti[k * 2]; // Frequenz aus dem Buffer lesen und in Dezimal konvertieren VFOAfreq += (freq_buffer[9 - k] & 0x0F) * decMulti[k * 2 + 1]; // Frequenz aus dem Buffer lesen und in Dezimal konvertieren } } } // ********************************************************Softwarereset**************************************************************************** void software_reset(){ up = digitalRead(uppin); // up Taste abfragen down = digitalRead(downpin); // down Taste abfragen if (up == LOW && down == LOW){ // wenn up und down Taste gleichzeitig betätigt asm volatile (" jmp 0"); // Software Reset } } // *******************************************************Menüsteuerung**************************************************************************** void menuset(){ menuState = digitalRead(menuPin); // Auslesen der Menütaste if (menuState != lastmenuState) // wenn sich der Menü Status geändert hat { if (menuState == LOW) // wenn Menü Status LOW (Menütaste gedrückt) { delay(200); // Verzögerung menuPushCounter = 5; // maximal 4 Menüs verfügbar Menütastenzähler auf 5 setzen menubool = true; // menü aktivieren } if (menuState == HIGH) // wenn Menü Status HIGH { menubool = false; // menü deaktivieren } } if (menubool == true && menuPushCounter == 5) // wenn Menü aktiviert und Menütastenzähler 5 { menucounter = 0; // Menüzähler auf 0 setzen menu(); // Menü starten } lastmenuState = menuState; // Menüstatus setzen } // *******************************************Menüsteuerung zum Setzen und Speichern der Offsets*************************************************** int menu() { lcd.clear(); // LCD löschen delay(100); // Verzögerung while (menucounter < 5) // while Menu enspricht der max Anzahl der Menüs { menuState = digitalRead(menuPin); // Menü Taste abfragen up = digitalRead(uppin); // up Taste abfragen down = digitalRead(downpin); // down Taste abfragen if (menuState != lastmenuState) // wenn sich der Menü Status geändert hat { lcd.clear(); // LCD löschen if (menuState == LOW) // wenn Menü Status LOW { delay(200); // Verzögerung menucounter++; // Menüzähler um 1 erhöhen } } lastmenuState = menuState; // letzten Menüstatus auf Menü Status setzen switch (menucounter) { // Menüauswahl case 0: // Menü 1 lcd.setCursor(0, 0); // 1. Zeichen, 1. Zeile lcd.print("TX Oscillator [Hz]"); // schreiben lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print(TXosz); // schreiben if (up == LOW) // wenn up Taste betätigt { delay(200); // Verzögerung TXosz=TXosz+(sw*10); // Wert um Schrittweite *10 erhöhen lcd.clear(); // LCD löschen } if (down == LOW) // wenn down Taste betätigt { delay(200); // Verzögerung TXosz=TXosz-(sw*10); // Wert um Schrittweite *10 vermindern lcd.clear(); // LCD löschen } break; // aussteigen, dieses Menü beginnt dann von vorne case 1: // Menü 2 lcd.setCursor(0, 0); // 1. Zeichen, 1. Zeile lcd.print("RX Oscillator[Hz/10]"); // schreiben lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print(RXosz); // schreiben if (up == LOW) // wenn up Taste betätigt { delay(200); // Verzögerung RXosz=RXosz+sw; // Wert um Schrittweite erhöhen lcd.clear(); // LCD löschen } if (down == LOW) // wenn down Taste betätigt { delay(200); // Verzögerung RXosz=RXosz-sw; // Wert um Schrittweite vermindern lcd.clear(); // LCD löschen } break; // aussteigen, dieses Menü beginnt dann von vorne case 2: // Menü 3 lcd.setCursor(0, 0); // 1. Zeichen, 1. Zeile lcd.print("Split Offset [Hz]"); // schreiben lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print(Splitoffset); // schreiben if (up == LOW) // wenn up Taste betätigt { delay(200); // Verzögerung Splitoffset=Splitoffset+(sw*10); // Wert um Schrittweite*10 erhöhen lcd.clear(); // LCD löschen } if (down == LOW) // wenn down Taste betätigt { delay(200); // Verzögerung Splitoffset=Splitoffset-(sw*10); // Wert um Schrittweite*10 vermindern lcd.clear(); // LCD löschen } break; // aussteigen, dieses Menü beginnt dann von vorne case 3: // Menü 4 lcd.setCursor(0, 0); // 1. Zeichen, 1. Zeile lcd.print("Step size"); // schreiben if (up == LOW) // wenn up Taste betätigt { delay(200); // Verzögerung sw=sw*10; // Wert mit 10 multiplizieren lcd.clear(); // LCD löschen } if (down == LOW) // wenn down Taste betätigt { delay(200); // Verzögerung sw=sw/10; // Wert durch 10 dividieren lcd.clear(); // LCD löschen } if (sw*10 > 100000000) {sw=1;} // max Begrenzung auf 100M if (sw < 1) {sw=1;} // min Begrenzung auf 1 if (sw*10 < 1000){ // Beschriftung und Umrechnung in Hz lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print(sw*10); // schreiben lcd.setCursor(5, 1); // 5. Zeichen, 2. Zeile lcd.print("Hz"); // schreiben } if (sw*10 > 999 && sw*10 < 1000000){ // Beschriftung und Umrechnung in KHz lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print(sw*10/1000); // schreiben lcd.setCursor(5, 1); // 5. Zeichen, 2. Zeile lcd.print("KHz"); // schreiben } if (sw*10 > 999999 && sw*10 < 1000000000){ // Beschriftung und Umrechnung in MHz lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print(sw*10/1000000); // schreiben lcd.setCursor(5, 1); // 5. Zeichen, 2. Zeile lcd.print("MHz"); // schreiben } break; // aussteigen, dieses Menü beginnt dann von vorne case 4: // Menü 5, hier werden die Werte gespeichert und der arduino beginnt loop neu auszuführen lcd.setCursor(0, 0); // 1. Zeichen, 1. Zeile lcd.print("store Offsets?"); // schreiben lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print("down or menu= No"); // schreiben lcd.setCursor(18, 2); // 1. Zeichen, 3. Zeile lcd.print("up= Yes"); // schreiben if (up == LOW) // wenn up Taste betätigt { delay(200); // Verzögerung EEPROM.put(0, TXosz); // Wert ins eeprom schreiben (Adresse 0) delay(200); // Verzögerung EEPROM.put(10, RXosz); // Wert ins eeprom schreiben (Adresse 10) delay(200); // Verzögerung lcd.setCursor(0, 1); // 1. Zeichen, 1. Zeile delay(200); // Verzögerung lcd.clear(); // LCD löschen lcd.print("Offsets stored"); // schreiben delay(2000); // Verzögerung lcd.clear(); // LCD löschen delay(200); // Verzögerung menucounter = 5; // Menü Zähler auf 5 setzen menuPushCounter = 0; // Menütastenzähler auf 0 setzen break; // aussteigen, zurück zu loop } if (down == LOW) // wenn down Taste betätigt { lcd.clear(); // LCD löschen delay(200); // Verzögerung menucounter = 5; // Menü Zähler auf 5 setzen menuPushCounter = 0; // Menütastenzähler auf 0 setzen break; // aussteigen, zurück zu loop } } } } // ********************** Menüsteuerung im Setup zum Setzen und Speichern der CI-V Adresse und TX Power ********************************* int setupmenu() { civadr = EEPROM.get(20, civadr); // CI-V Adresse aus dem eeprom lesen txPower = EEPROM.get(30, txPower); // TX Power in % aus dem eeprom lesen lcd.clear(); // LCD löschen delay(100); // Verzögerung while (menucounter < 3) // while Menu enspricht der max Anzahl der Menüs { menuState = digitalRead(menuPin); // Menü Taste abfragen up = digitalRead(uppin); // up Taste abfragen down = digitalRead(downpin); // down Taste abfragen if (menuState != lastmenuState) // wenn sich der Menü Status geändert hat { lcd.clear(); // LCD löschen if (menuState == LOW) // wenn Menü Status LOW { delay(200); // Verzögerung menucounter++; // Menüzähler um 1 erhöhen } } lastmenuState = menuState; // letzten Menüstatus auf Menü Status setzen switch (menucounter) { // Menüauswahl case 0: // Menü 1 lcd.setCursor(0, 0); // 1. Zeichen, 1. Zeile lcd.print("CI-V Address [HEX]"); // schreiben lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print(civadr, HEX); // schreiben if (up == LOW) // wenn up Taste betätigt { delay(200); // Verzögerung civadr=civadr+1; // Wert um 1 erhöhen lcd.clear(); // LCD löschen } if (down == LOW) // wenn down Taste betätigt { delay(200); // Verzögerung civadr=civadr-1; // Wert um 1 vermindern lcd.clear(); // LCD löschen } if (civadr > 255) {civadr=1;} // max Begrenzung auf 255 if (civadr < 0) {civadr=255;} // min Begrenzung auf 0 break; // aussteigen, dieses Menü beginnt dann von vorne case 1: // Menü 2 lcd.setCursor(0, 0); // 1. Zeichen, 1. Zeile lcd.print("TX Power [0-100 %]"); // schreiben lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print(txPower); // schreiben if (up == LOW) // wenn up Taste betätigt { delay(200); // Verzögerung txPower=txPower+1; // Wert um 1 erhöhen lcd.clear(); // LCD löschen } if (down == LOW) // wenn down Taste betätigt { delay(200); // Verzögerung txPower=txPower-1; // Wert um 1 vermindern lcd.clear(); // LCD löschen } if (txPower > 100) {txPower=1;} // max Begrenzung auf 100 if (txPower < 0) {txPower=100;} // min Begrenzung auf 0 break; // aussteigen, dieses Menü beginnt dann von vorne case 2: // Menü 3, hier werden die Werte gespeichert und der arduino beginnt loop neu auszuführen lcd.setCursor(0, 0); // 1. Zeichen, 1. Zeile lcd.print("store Offsets?"); // schreiben lcd.setCursor(0, 1); // 1. Zeichen, 2. Zeile lcd.print("down or menu= No"); // schreiben lcd.setCursor(18, 2); // 1. Zeichen, 3. Zeile lcd.print("up= Yes"); // schreiben if (up == LOW) // wenn up Taste betätigt { delay(200); // Verzögerung EEPROM.put(20, civadr); // Wert ins eeprom schreiben (Adresse 20) delay(200); // Verzögerung EEPROM.put(30, txPower); // Wert ins eeprom schreiben (Adresse 20) delay(200); // Verzögerung lcd.setCursor(0, 1); // 1. Zeichen, 1. Zeile delay(200); // Verzögerung lcd.clear(); // LCD löschen lcd.print("Offsets stored"); // schreiben delay(2000); // Verzögerung lcd.clear(); // LCD löschen delay(200); // Verzögerung menucounter = 3; // Menü Zähler auf 2 setzen menuPushCounter = 0; // Menütastenzähler auf 0 setzen break; // aussteigen, zurück zu loop } if (down == LOW) // wenn down Taste betätigt { lcd.clear(); // LCD löschen delay(200); // Verzögerung menucounter = 3; // Menü Zähler auf 3 setzen menuPushCounter = 0; // Menütastenzähler auf 0 setzen break; // aussteigen, zurück zu loop } } } } //******************************************************************loop************************************************************* void loop(){ Bluetoothstate(); // Bluetoothstatus abfragen menuset(); // Menü ausführen LCDBeschriftung(); // LCD Beschriftung ausführen RXTXBeschriftung(); // RX TX Statusbeschriftung ausführen calculateFrequency(); // Frequenzberechnung ausführen read_RXfreq(); // RX Frequenz lesen ausführen if (VFOAfreq > VFOBfreq){ // nur wenn VFOAfreq > VFOBfreq ist print_RXfreq1(); // RX Frequenz am Display schreiben print_TXfreq1(); // TX Frequenz am Display schreiben VFOB_nachziehen1(); // VFOB nachziehen ausführen } if (VFOAfreq < VFOBfreq){ // nur wenn VFOAfreq < VFOBfreq ist print_RXfreq2(); // RX Frequenz am Display schreiben print_TXfreq2(); // TX Frequenz am Display schreiben VFOB_nachziehen2(); // VFOB nachziehen ausführen } software_reset(); // Software Reset ausführen delay(10); // Verzögerung /* Serial.print("VFOAfreq "); // nur für Testzwecke Serial.println(VFOAfreq); // nur für Testzwecke Serial.print("VFOBfreq "); // nur für Testzwecke Serial.println(VFOBfreq); // nur für Testzwecke Serial.print("freqmem "); // nur für Testzwecke Serial.println(freqmem); // nur für Testzwecke Serial.print("freq "); // nur für Testzwecke Serial.println(freq); // nur für Testzwecke Serial.println("-------------------"); // nur für Testzwecke */ } |
| VFOA | VFOB | ||||
| SAT RX | SAT TX | Shift | uint32 | ||
| 10.489.750.000 | 2.400.250.000 | 8.089.500.000 | max. | 4.294.967.295 | |
| OSZ | OSZ | ||||
| 10.054.000.000 | 2.256.000.000 | ||||
| ZF | |||||
| 435.750.000 | 144.250.000 | ||||
| Berechnete TX ZF | |||||
| 144.250.000 | RXZF+RXOsz-Shift-TXOsz | ||||
| VFOA | VFOB | ||||
| SAT RX | SAT TX | Shift | |||
| 10.489.750.000 | 2.400.250.000 | 8.089.500.000 | |||
| OSZ | OSZ | ||||
| 10.345.000.000 | 1.965.000.000 | ||||
| ZF | |||||
| 144.750.000 | 435.250.000 | ||||
| Berechnete TX ZF | |||||
| 435.250.000 | RXZF+RXOsz-Shift-TXOsz | ||||
| VFOA | VFOB | ||||
| SAT RX | SAT TX | Shift | |||
| 10.489.750.000 | 2.400.250.000 | 8.089.500.000 | |||
| OSZ | OSZ | ||||
| 10.461.000.000 | 2.349.000.000 | ||||
| ZF | |||||
| 28.750.000 | 51.250.000 | ||||
| Berechnete TX ZF | |||||
| 51.250.000 | RXZF+RXOsz-Shift-TXOsz | ||||
| VFOA | VFOB | ||||
| SAT RX | SAT TX | Shift | |||
| 10.489.750.000 | 2.400.250.000 | 8.089.500.000 | |||
| OSZ | OSZ | ||||
| 10.438.000.000 | 2.372.000.000 | ||||
| ZF | |||||
| 51.750.000 | 28.250.000 | ||||
| Berechnete TX ZF | |||||
| 28.250.000 | RXZF+RXOsz-Shift-TXOsz |